惯性导航-IMU在无人驾驶中的应用与挑战
本文探讨了惯性导航系统(Inertial Navigation System, INS)与惯性测量单元(Inertial Measurement Unit, IMU)在无人驾驶中的应用与面临的挑战。文章首先概述了INS与IMU的基本原理及其在无人驾驶中的重要性。接着从六个方面详细阐述了其应用,包括高精度定位、姿态估计、环境感知、导航融合、系统冗余以及成本与可靠性。每一方面都讨论了具体的应用场景、技术优势以及所面临的挑战。文章总结了INS与IMU在无人驾驶中的应用前景,并指出未来发展的方向和需要克服的技术难题。
高精度定位
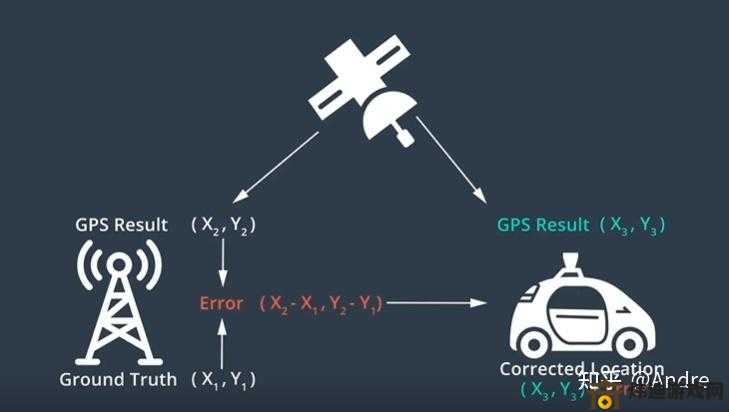
惯性导航系统(INS)在无人驾驶中主要用于提供高精度的定位信息。通过加速度计和陀螺仪,INS能够实时计算车辆的位移和速度,这在GPS信号不稳定或受阻的环境中尤为重要。INS存在累积误差的问题,长时间运行后定位精度会逐渐下降。研究人员致力于开发更高精度的传感器和算法,以减少累积误差。结合其他传感器数据进行校正也是一个常见的解决方案。
姿态估计
无人驾驶车辆需要精确的姿态信息来确保行驶稳定性和安全性。IMU通过测量角速度和加速度来估计车辆的姿态,包括俯仰、滚转和偏航角。姿态估计对于车辆的动态控制和路径规划至关重要。IMU的测量误差和环境干扰(如振动)会影响姿态估计的准确性。解决这一挑战的方法包括使用多传感器融合技术和改进滤波算法。
环境感知
INS与IMU不仅用于定位和姿态估计,还可以辅助环境感知。通过与激光雷达、摄像头等传感器数据融合,IMU可以帮助车辆更好地理解周围环境,提高驾驶决策的准确性。环境感知需要处理大量数据,如何在有限的计算资源下高效处理是主要挑战。传感器间的同步和数据融合算法的优化也是关键问题。
导航融合
在无人驾驶中,单一导航系统往往不足以满足所有需求,因此多传感器融合成为必然选择。INS与GPS、视觉SLAM等技术结合,可以提供更高精度和可靠性的导航信息。不同传感器的数据融合涉及到复杂的算法设计和实时处理能力,同时需要考虑不同传感器之间的时间同步和数据一致性问题。
系统冗余
为了提高无人驾驶系统的可靠性,通常会设计冗余系统。多套INS/IMU的配置可以提供故障备份,确保即使一套系统失效,车辆也能继续安全行驶。但这增加了系统的复杂性和成本,如何在冗余与成本之间找到平衡是设计者面临的挑战。
成本与可靠性
尽管INS与IMU在无人驾驶中展现出巨大潜力,但其高成本和维护复杂性限制了其广泛应用。如何降低成本,同时保持或提高系统的可靠性是当前研究的重点。采用低成本MEMS传感器和优化算法设计是降低成本的途径,但这也带来了一些新的挑战,如精度和可靠性的下降。
惯性导航系统和惯性测量单元在无人驾驶中扮演着重要角色,其应用从高精度定位到环境感知、导航融合等多方面。这些技术在实际应用中面临着累积误差、环境干扰、成本和可靠性等多重挑战。未来的发展方向将集中在提高传感器精度、优化算法、多传感器融合技术以及降低系统成本,同时确保系统的安全性和可靠性。通过持续的研究和技术创新,INS与IMU有望在无人驾驶领域取得更大的突破。